
Optimizing Robotic Automation and Manufacturing System Layouts using Digital Twins
Project Vision
Visualizing and monitoring industrial processes in large-scale setups might get challenging and tiresome when we must individually oversee the operations of each machine. The Build@Scale lab at Purdue University aims to devise a solution by creating a digital twin of a manufacturing facility. We want to test and validate the most efficient process to replicate real-time lab operations digitally.
The Context: Build@Scale Labs at Purdue University

We aim to create a digital twin of the Build@Scale Lab, Purdue University.
The Build@Scale Lab is a state-of-the-art setup that is backed by Industry 4.0. This lab is designed to be fully reconfigurable, fully integrated enterprise platform that envisions data capture and collection from individual machines, prototype manufacturing production lines, roving co-bots and robots, and ASRS.
With its complex machinery setups and large surface area, this is an ideal use case to demonstrate the efficiency of digital twins.
This concept is very scalable and can be adopted to large-scale factories and manufacturing plants.
The project is done in phases. We start with 3D scanning the lab and the machinery models and refining the complete model on various CAD and modeling software. This model is taken into NVIDIA Omniverse and postprocessed. The visualization and real-time simulation is done on this software.
The Methodology

Phase 1: 3D Modeling of the Lab Warehouse
The Process
The project is done in phases. We start with 3D scanning the lab and the machinery models and refining the complete model on various CAD and modeling software. This model is taken into NVIDIA Omniverse and postprocessed. The visualization and real-time simulation is done on this software.

We start by scanning the lab using a LiDAR Scanner and capture all the data.
The result is a collection of points- called the Point Cloud Data.
This is then imported into a CAD software.
The data is taken into Autodesk REVIT BIM, and we start modeling around the data.
The data gives us accurate measurements and details.
This reduces manual labor, saves time, and increases efficiency.
After the building model is completed, we can hide the point cloud data to get our clean model.
This can now be imported into Omniverse for further modifications.
A comprehensive 3D architectural model is made, with maximum detail, to replicate the real-life elements. The point cloud is hidden for a clean model. This CAD model is ready to be populated further with the machinery in the next step.
The Result


Phase 2: 3D Scanning and Modeling of the Machinery
The Process

How do scanners work?
The 3D scanner is used to scan complex machinery parts and models.
The scanner comes in various sizes- from handheld ones to large-scale machines.
Instead of manually modeling the machinery and its parts, the scanner converts the scans into a mesh- which can directly be imported into any 3D modeling software.
The scan is edited in the software and then attached to the CAD file.
The CAD file is then taken into Omniverse.
The Result
Use Case 1: Fryer Mill Machining Bed
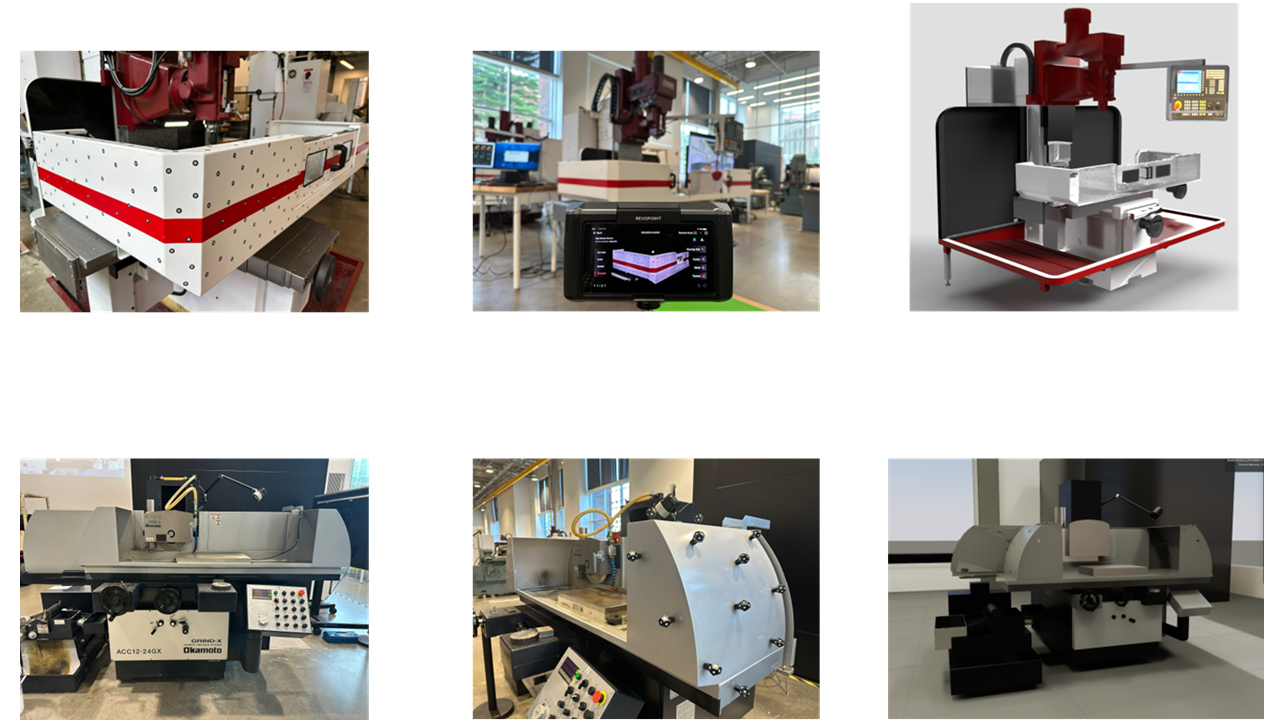
The Scanning Process
Markers to be scanned.
Scanning with spray
The final model
Use Case 2: Okamoto Grinder
Magnetic markers to be scanned
The final model
Use Case 3: Chevalier Legacy Machine
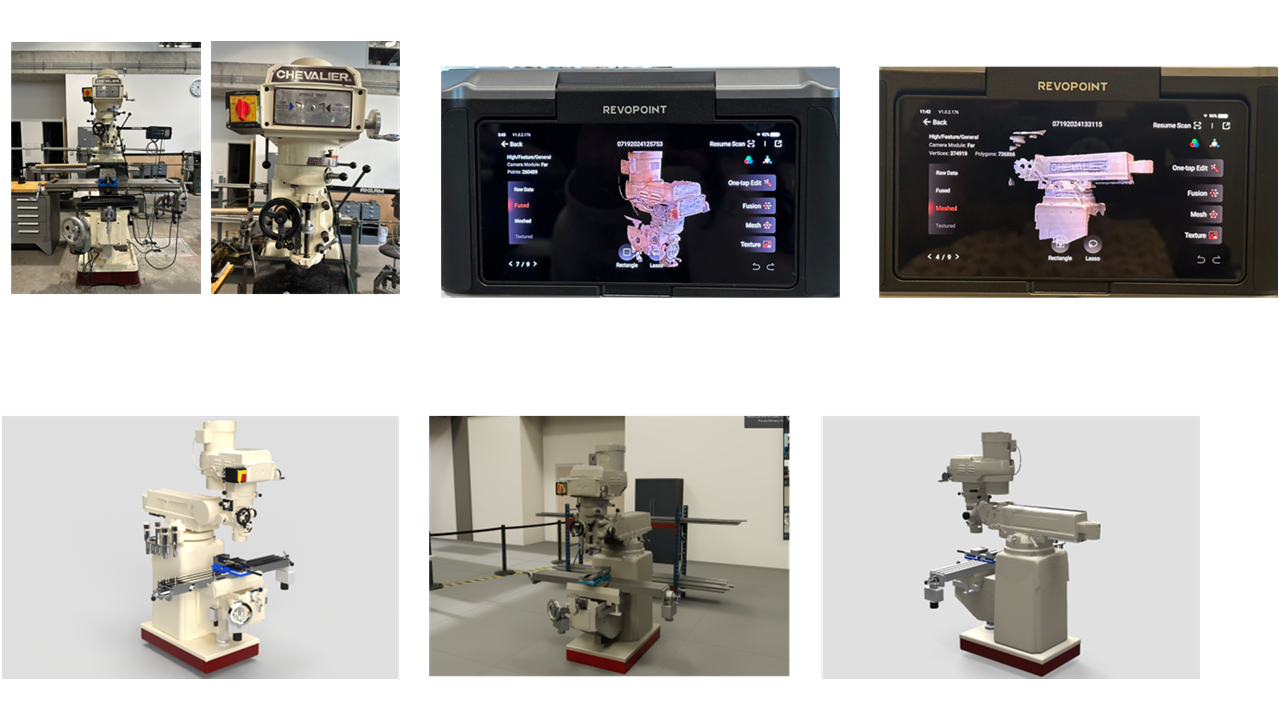
Scanning with spray
Machine scanned part-by-part
The final model
Phase 3: Omniverse Integration
What is Omniverse?
Omniverse is a real-time 3D graphics collaboration platform created by NVIDIA. It has been used for applications in the visual effects and "digital twin" industrial simulation industries.
Omniverse allows you to add environments, lighting, assets (furniture, machines, etc.), and materials to the model.
The CAD model is moved into Omniverse to start the realistic rendering process.
This helps make the model more realistic before we move onto the simulation.

The Result: Model Visualization
The model in Omniverse is populated with various elements like furniture, lighting, machinery, materials, and architectural elements. This is then rendered using high-quality settings to make it as realistic as possible.




TM12 Robotic Arm and Kardex Vertical Lift

Chevalier Legacy Machine

Fryers and Lathes

Okamoto Grinder
Real-Time Simulation
The next step is the program the digital twin of all the machines and robots using NVIDIA Omniverse Issac Sim, a robot manipulation tool.
The video clip below shows the real-time movement of the TM-12 robotic arm through the digital twin.
Next Steps and Future Scope
In the near future, we aim to showcase a project which combines all of the Build @ Scale projects to develop a Completely autonomous lights out factory where an order placed online will trigger a reaction in the respective factory assets to produce the ordered part which can also be visualized as a digital twin in Omniverse for monitoring.

Current Work
I am working on an extension for Omniverse that can help pull data from the robots and machinery and feed it into the software for real-time simulation. This is a novel approach to democratise the process, by creating a base extension that can work with all the software in the lab.